背景问题 有时候,我们会使用深度神经网络来学习数据。如果效果不理想,常常都会 加深和加宽全连接层 来让效果更加的完善。但是加深加宽网络会引来更加多的问题,比如 梯度消失/梯度爆炸 等。width/height/3 color channels 等,加深加宽网络下的模型,结果往往未如理想。CNN 就是为了解决上述的问题的。CNN 即是 Convolution Neural Network,卷积神经网络。
先讲解不同的子组件,再组合起来,形成手写的模型,这样就更加容易的去理解模型。
卷积和卷积核 卷积 来源矩阵 和 卷积核矩阵 一个个对应位置进行相乘后,再相加的运算。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 input_array = np.array([[1 , 2 , 3 ], [4 , 5 , 6 ], [7 , 8 , 9 ]]) kernel_array = np.array([[1 , 0 , 0 ], [0 , 1 , 0 ], [0 , 0 , 1 ]]) Output: [[15 ]]
如果加上 padding 和 stride 的话,即卷积核就可以沿着 来源矩阵 滑动,完成整个卷积操作。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 input_array = np.array([[1 , 2 , 3 ], [4 , 5 , 6 ], [7 , 8 , 9 ]]) kernel_array = np.array([[1 , 0 , 0 ], [0 , 1 , 0 ], [0 , 0 , 1 ]]) Output: [[ 6 8 3 ] [12 15 8 ] [ 7 12 14 ]]
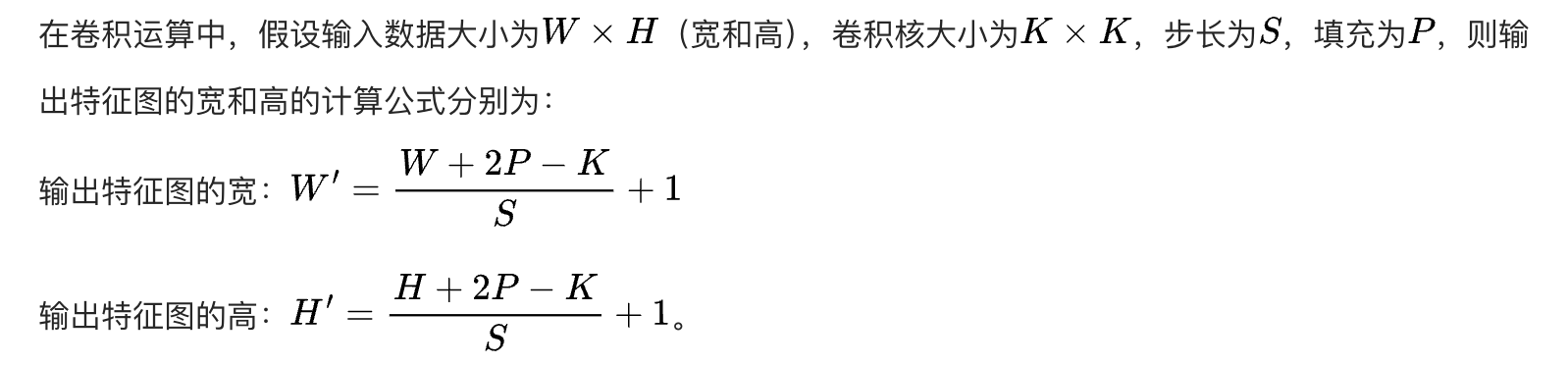
卷积核 kernel's size,padding , stride 与 输入矩阵 input 和输出矩阵 output 大小的对应关系:
如果是 3*3 的卷积核,padding=1 stride=1,输入和输出的矩阵大小一致。
卷积核 kernel_array,[[1, 0, 0],[0, 1, 0],[0, 0, 1]],他是 3X3 的卷积核。
从 网站 知道,不同的卷积核应用到相同的图片上,可以得到不同的结果。比如有一些是可以提取边缘特征,有些是可以模糊的。
💊 卷积核,就是提取特征的矩阵。有多少个卷积核,就是代表提取多少个特征。不同的卷积核可以提取不同的特征。
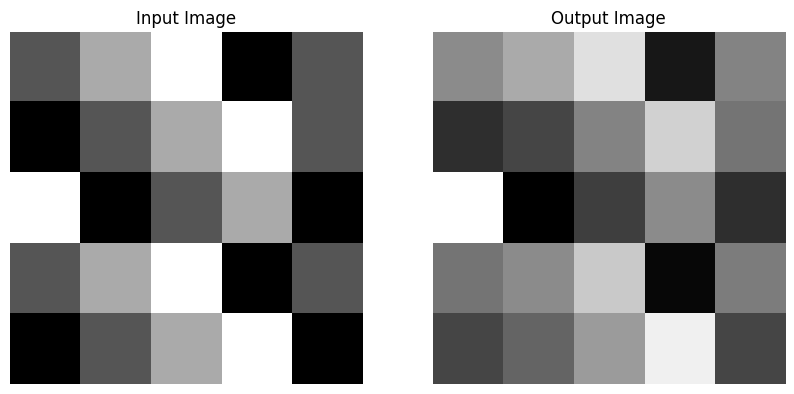
下面的代码,就是使用预设的卷积核(提取边缘轮廓特征的卷积核)去获取特征,我们可以看到直接输出的结果。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 import torchimport torch.nn as nnimport matplotlib.pyplot as pltimport numpy as npinput_image = torch.tensor([[[[1 , 2 , 3 , 0 , 1 ], [0 , 1 , 2 , 3 , 1 ], [3 , 0 , 1 , 2 , 0 ], [1 , 2 , 3 , 0 , 1 ], [0 , 1 , 2 , 3 , 0 ]]]], dtype=torch.float32) conv_layer = nn.Conv2d(in_channels=1 , out_channels=1 , kernel_size=3 , stride=1 , padding=1 ) edge_detection_kernel = torch.tensor([[[[-1 , -1 , -1 ], [-1 , 8 , -1 ], [-1 , -1 , -1 ]]]], dtype=torch.float32) conv_layer.weight = torch.nn.Parameter(edge_detection_kernel) conv_layer.bias = torch.nn.Parameter(torch.zeros(1 )) output_image = conv_layer(input_image) output_image_np = output_image.detach().numpy().squeeze() def visualize_images (input_img, output_img ): fig, axes = plt.subplots(1 , 2 , figsize=(10 , 5 )) axes[0 ].imshow(input_img.squeeze(), cmap='gray' ) axes[0 ].set_title('Input Image' ) axes[0 ].axis('off' ) axes[1 ].imshow(output_img, cmap='gray' ) axes[1 ].set_title('Output Image' ) axes[1 ].axis('off' ) plt.show() visualize_images(input_image, output_image_np) print ("Input Image:\n" , input_image.squeeze().numpy())print ("\nOutput Image:\n" , output_image_np)
1 2 3 4 5 6 7 8 9 10 11 12 13 Input Image: [[1. 2. 3. 0. 1. ] [0. 1. 2. 3. 1. ] [3. 0. 1. 2. 0. ] [1. 2. 3. 0. 1. ] [0. 1. 2. 3. 0. ]] Output Image: [[ 5. 9. 16. -10. 4. ] [ -7. -4. 4. 14. 2. ] [ 20. -13. -5. 5. -7. ] [ 2. 5. 13. -12. 3. ] [ -4. 0. 7. 18. -4. ]]
从结果知道(从灰度图看不出问题,但是从数字矩阵可以看出),这个卷积核令到 黑的更加的黑, 白的更加的白,突出了特征。
卷积的好处
卷积核,就是滑过数据的共享参数,那么他能够提取对应的特征数据。所以一个卷积核对应着一个特征。需要提取的特征,不论是在图片的哪个位置,都可以提取出来。
比如 100 * 100 的图像,要去识别苹果,但是这个苹果有可能出现在上下左右,随机的位置。NN 神经网络 就要使用 (100 * 100, n, n) 网络, 网络的输入是每个坐标像素。但是苹果的出现的位置是随机的,即坐标是随机的,所以对应的神经元也是需要学习,导致非常难收敛。同时,参数量就是巨大的,达到 10000 * n * n。CNN,可以针对 苹果轮廓 训练 对应卷积核,达到识别的效果,就大大减少参数量。参数量就是 卷积核上的数值 和 后续的高维度的全链接网络的参数。
如果上例子中,苹果轮廓信息是共享的。
池化 有平均池化和最大值池化,他 没有参数学习 ,完全是按照默认的逻辑去运行的。
平均池化,取平均值,会模糊特征,他可以考虑到所有像素的关系;
最大值池化,取最大值,就突出了特征了,完全是忽视了最小值。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 Input_array: [[ 1. 2. 3. 4. ] [ 5. 6. 7. 8. ] [ 9. 10. 11. 12. ] [13. 14. 15. 16. ]] 应用 kernel_size=2 , stride=2 的 池化 Average Pooled Image: [[ 3.5 5.5 ] [11.5 13.5 ]] Max Pooled Image: [[ 6. 8. ] [14. 16. ]]
从结果知道,如果池化后,计算量是加上了 3/4,同时可以保留原来图像的特征。
池化好处
手写简单 CNN 网络 组装 卷积 和 _池化 _的一个网络,就是一个简单的 CNN 网络,比如 以下的代码就是一个简单的 卷积和池化操作相结合。
1 2 3 4 5 6 7 8 9 conv = .Conv2d(1 , 32 , kernel_size=3 , padding=1 pool = nn.MaxPool2d(kernel_size=2 , stride=2 ) x = pool(relu(conv(x)))
所有模型(包括 NN,CNN,AlexNet,ResNet,RNN 等 ),都是一个个的子组件的组装,就好像积木一样。所以理解好不同的 子组件的原理和用法,就更加容易理解由他们组装而成的大模型。
完整代码检测手写数字的图片 导入手写数字的图片库,同时使用一个 简单的 CNN 来训练
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 import torchimport torch.nn as nnimport torch.optim as optimimport torchvisionimport torchvision.transforms as transformsfrom torch.utils.data import DataLoaderimport torch.nn.functional as Fclass SimpleCNN (nn.Module): def __init__ (self ): super (SimpleCNN, self ).__init__() self .conv1 = nn.Conv2d(1 , 32 , kernel_size=3 , padding=1 ) self .pool = nn.MaxPool2d(kernel_size=2 , stride=2 ) self .conv2 = nn.Conv2d(32 , 64 , kernel_size=3 , padding=1 ) self .fc1 = nn.Linear(64 * 7 * 7 , 64 ) self .fc2 = nn.Linear(64 , 10 ) def forward (self, x ): x = self .pool(F.relu(self .conv1(x))) x = self .pool(F.relu(self .conv2(x))) x = x.view(-1 , 64 * 7 * 7 ) x = F.relu(self .fc1(x)) x = self .fc2(x) return x transform = transforms.Compose([ transforms.ToTensor(), transforms.Normalize((0.5 ,), (0.5 ,)) ]) trainset = torchvision.datasets.MNIST(root='../data/mnist' , train=True , download=True , transform=transform) trainloader = DataLoader(trainset, batch_size=64 , shuffle=True ) testset = torchvision.datasets.MNIST(root='../data/mnist' , train=False , download=True , transform=transform) testloader = DataLoader(testset, batch_size=64 , shuffle=False ) model = SimpleCNN() criterion = nn.CrossEntropyLoss() optimizer = optim.SGD(model.parameters(), lr=0.001 , momentum=0.9 ) num_epochs = 5 for epoch in range (num_epochs): running_loss = 0.0 for i, data in enumerate (trainloader, 0 ): inputs, labels = data optimizer.zero_grad() outputs = model(inputs) loss = criterion(outputs, labels) loss.backward() optimizer.step() running_loss += loss.item() if i % 100 == 99 : print (f'[Epoch {epoch + 1 } , Batch {i + 1 } ] loss: {running_loss / 100 :.3 f} ' ) running_loss = 0.0 print ('Finished Training' )correct = 0 total = 0 with torch.no_grad(): for data in testloader: images, labels = data outputs = model(images) _, predicted = torch.max (outputs.data, 1 ) total += labels.size(0 ) correct += (predicted == labels).sum ().item() print (f'Accuracy of the network on the 10000 test images: {100 * correct / total:.2 f} %' )''' # 部分打印 [Epoch 5, Batch 600] loss: 0.075 [Epoch 5, Batch 700] loss: 0.093 [Epoch 5, Batch 800] loss: 0.074 [Epoch 5, Batch 900] loss: 0.081 Finished Training Accuracy of the network on the 10000 test images: 98.08% '''
模型训练的结果是另人满意的。
说明 上面的例子,已经说明了 CNN 的整体的框架。
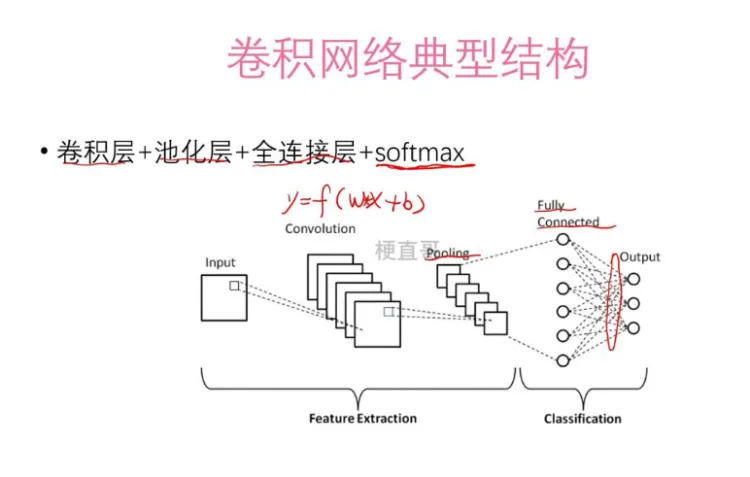
结构图 Feature Extraction: input 就是输入的数据,Convolution 就是卷积,Pooling 就是池化,到这步为止,就是从低维度特征的提取。Classification:之后对提取后的特征进行 高维全网络学习 和 softmax 进行分类。
一句话原理
全数据 先用卷积 提取特征,再使用 池化层 进行数据量的简化,同时保留特征 特征 再用全链接 学习规律
总结成一句话就是,每个组件都在自己擅长东西。
❓卷积核的 out_channel 是否重要?
nn.Conv2d(32, 64, kernel_size=3, padding=1) 中的 64 就是 out_channel
重要,他是决定了多少个卷积核,即多少个 features 可以给提取。
题外话,卷积核的 size,是决定了他可以识别的范围(接收野 receptive field),比如 小的卷积核,就可以识别精细的特征;大的,可以识别轮廓的特征。
❓卷积核的参数是学习而来,还是预设定的呢?不用 指定卷积核,让他去进行训练习得。
简要总结 卷积
共享参数
参数减少
可以有位置信息的共享
卷积核
out_channel 决定了提取多少个特征
kernel_size 决定你有多少的视野
_池化_,就是为了简化数量的同时,又可以保留特征;_全链接层_,对抽取的特征进行学习。
_CNN _就是组合上述组件,形成一个大的网络。
优缺点和场景
有空间位置信息,就可以使用卷积神经网络
特别图像识别